
Как выглядит кан шина на приоре
Содержание
- 1 Как выглядит кан шина на приоре
- 1.1 –>Автозапчасти и СТО –>
- 1.2 О принципе работы сетевого интерфейса CAN-шина
- 1.3 Особенности работы сети
- 1.4 CAN – интерфейс и диагностика системы
- 1.5 Что такое CAN-шина в автомобиле (устройство и схема подключения)
- 1.6 Зачем нужна в машине CAN-шина
- 1.7 Схема и место расположения КАН-интерфейса
- 1.8 Принцип работы
- 1.9 Виды CAN-шин
- 1.10 Как подключиться и сделать диагностику автомобиля
- 1.11 Неисправности
- 1.12 Плюсы и минусы встроенных шин
- 1.13 Прошивка can шины на Приоре 2 установка альтменю
- 1.14 Потребуется
- 1.15 Что такое CAN шина
- 1.16 Установка
- 1.17 Для чего CAN шина в автомобиле
- 1.18 Разработка сниффера и изучение протокола CAN шины
- 1.19 Разработка CAN шилда для Raspberry Pi
- 1.20 Распиновка щитка приборов Лада Приора/Калина
- 1.21 Подключение к CAN шине авто
- 1.22 Установка ПО для работы с CAN шиной
–>Автозапчасти и СТО –>
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
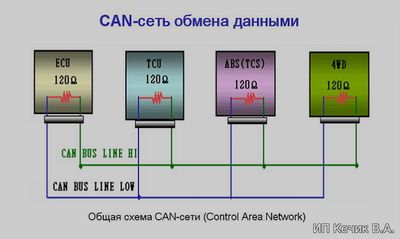
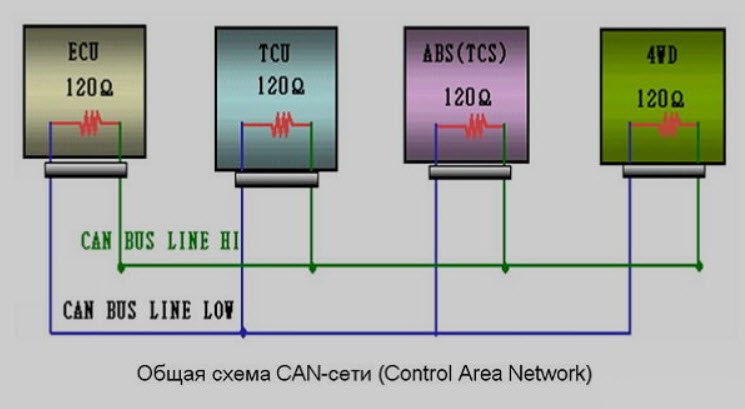
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Особенности работы сети
Следует понимать, что данные по CAN-сети передаются в виде кадров. Наиболее важные из них – это поле идентификатора (Identifire) и система данных (Data). Наиболее часто используемый тип сообщения по Кан-шине – Data Frame. Данный тип передачи данных состоит из так называемого арбитражного поля и определяет приоритетную передачу данных в том случае, если сразу несколько узлов системы передают данные на CAN-шину.
Каждое из подключенных к шине устройств управления имеет свое входное сопротивление, а общая нагрузка рассчитывается из суммы всех подключенных к шине исполняемых блоков. В среднем, входное сопротивление систем управления двигателем, которые подключаются на CAN-шину, составляет 68-70 Ом, а сопротивление информационно-командной системы может составлять до 3-4 ОМ.
CAN – интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу “К”-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Важно отметить, что определенных стандартов для разъемов сети Can на сегодняшний день не существует. Поэтому каждый из протоколов определяет свой тип разъемов на CAN-шине, в зависимости от нагрузки и других параметров.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Основные режимы работы CAN-шины: активный (зажигание включено); спящий (при выключенном зажигании); пробуждение и засыпание (при включении и выключении зажигания). Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
Преимущества и недостатки применения КАН-шины в автомобиле Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля. Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя. Основные преимущества применения CAN-шины: возможность проведения оперативного контроля и диагностики всех систем автомобиля; объединение потоков информации в едином помехозащищенном канале; универсальность, способствующая унификации процессов диагностирования; возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля). Недостатки CAN-шины: невысокая надежность; повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения. Устранение неисправностей На приборной панели автомобиля отсутствует индикаторная лампа неисправности CAN. Судить о том, что работоспособность CAN-шины нарушается, можно по косвенным показателям: на приборной панели одновременно загорелись несколько индикаторных ламп неисправностей; пропали показатели температуры охлаждающей жидкости, уровни топлива; загорелся «CHECK ENGINE». Прежде всего, следует выполнить диагностику. Если она покажет на неисправность CAN-шины, следует приступить к устранению проблемы. Последовательность работ: Найти проводники витой пары шины. Часто они имеют черный (высокий уровень) и оранжево-коричневый (низкий) цвета. Проверить при включенном зажигании с помощью мультиметра напряжения на проводниках. Уровни не должны быть равны 0 или более 11 Вольт (обычно около 4,5 Вольта). Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв. Приступить к поиску обрыва или короткого замыкания. Если есть подозрение на то, что замыкание шины происходит по причине отказа какого-либо блока управления, можно последовательно отключать блоки управления и контролировать сопротивление и работоспособность шины. Неисправность CAN-шины относится к сложным неисправностям электрооборудования автомобиля. Если у автовладельца нет необходимых навыков ремонта электрики, то лучше воспользоваться услугами специалиста.
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Источник: lubimauto.ru, voditeliauto.ru.
Что такое CAN-шина в автомобиле (устройство и схема подключения)
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
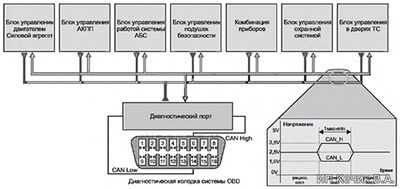
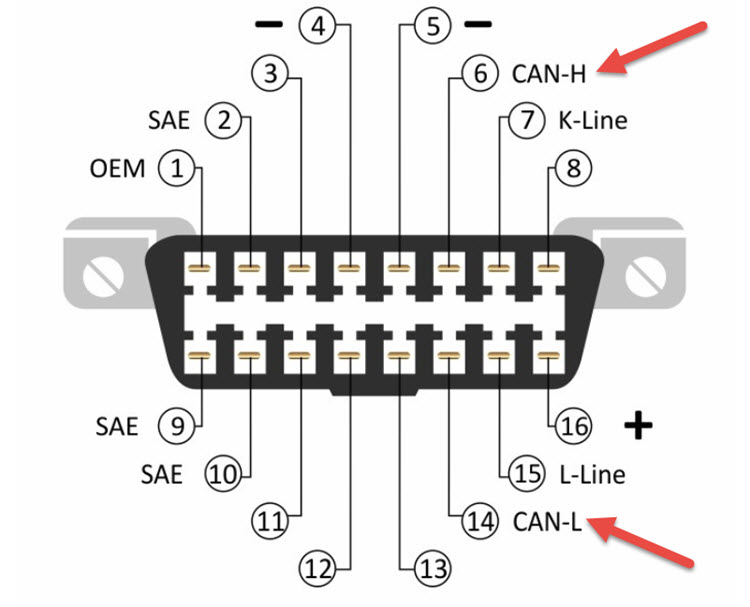
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Прошивка can шины на Приоре 2 установка альтменю



Потребуется
Панель приборов «Итэлма» с навигацией может быть двух видов (внешне ничем не отличаются):
- 2170-3801010-50 без CAN-шины;
- 2170-3801010-60 с CAN-шины.
Они не взаимозаменяемы, поэтому перед покупкой следует определить, используется ли на вашем автомобиле CAN-шина или нет.
- до 06.2012 года выпускались машины без CAN-шины;
- снять комбинацию приборов и посмотреть артикул или на колодку с проводами (см. распиновку разъемов ниже).
Для Калины (ВАЗ 1117, 1118, 1119) — все машины без CAN-шины.
- Правый подрулевой переключатель с джойстиком (каталожный номер: 1118-3709340-20);
- Антенна (для установки на крышу): 1118-7903074.
Также можно купить готовые комплекты (приборка + антенна + переключатель):
- для Лада Приора — 2170-3801010-55;
- для Лада Калина 1 — 1118-3801010-55.
Что такое CAN шина
CAN-шина – это одно из устройств в электронной автоматике автомобиля, на которое возлагается задача по объединению различных датчиков и процессоров в общую синхронизированную систему. Она обеспечивает сбор и обмен данными, посредством чего в работу различных систем и узлов машины вносятся необходимые корректировки.
Аббревиатура CAN расшифровывается как Controller Area Network, то есть сеть контроллеров. Соответственно, CAN-шина – это устройство, принимающее информацию от устройств и передающее между ними. Данный стандарт был разработан и внедрён более 30 лет назад компанией Robert Bosch GmbH. Сейчас его используются в автомобилестроении, промышленной автоматизации и сфере проектирования объектов, обозначаемых «умными», например, домов.
Установка

Замена старой панели приборов без CAN на щиток с навигацией без CAN (2170-3801010-50) выполняется без доработок. Снимаем старую панель и вместо нее устанавливаем новую, вставляем разъем с проводами, подключаем антенну (закрепляем ее на крыше) и при необходимости меняем правый подрулевый переключатель.
Если старая комбинация приборов без навигации, но с CAN и вместо нее планируется установить новый щиток с навигацией с CAN (2170-3801010-60), тогда нужно переставить контакты 10-11 на 28-29 (если после подключения все равно не работает, меняем 28 и 29 местами).
После установки новой панели приборов пробег обнулится.




Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
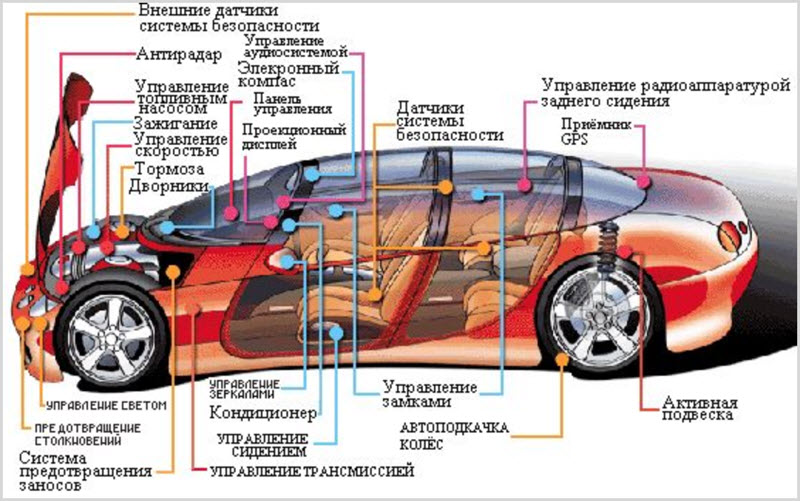
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.
Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Разработка сниффера и изучение протокола CAN шины

После того как я получил доступ к прослушиванию CAN шины, мне нужно расшифровать кто кому и что передает. Формат пакета CAN показан на рисунке.

Все утилиты из набора can-utils сами умеют разбирать CAN пакеты и отдают только полезную информацию, а именно:
- Идентификатор
- Длина данных
- Данные
Данные передаются в не зашифрованном виде, это облегчило изучение протокола. На Raspberry Pi я написал маленький сервер который перенаправляет данные с candump в TCP/IP, чтобы на компьютере разобрать поток данных и красиво показать их.
Для macOS я написал простое приложение, которое для каждого адреса устройства добавляет ячейку в табличку и в этой ячейке я уже вижу какие данные меняются.

Нажимаю кнопку стеклоподъемника я нашел ячейку в которой меняются данные, затем я и определил какие команды соответствуют нажатию вниз, нажатию вверх, удержанию вверх, удержанию вниз.
Проверить, что команда работает, можно отправив из терминала, например команду поднять левое стекло вверх:
cansend can0 181#0200 Команды, которые передают устройства по CAN шине в автомобилях VAG (Skoda Octavia 2011), полученные методом реверс-инжиниринг: // Front Left Glass Up 181#0200 // Front Left Glass Down 181#0800 // Front Right Glass Up 181#2000 // Front Right Glass Down 181#8000 // Back Left Glass Up 181#0002 // Back Left Glass Down 181#0008 // Back Right Glass Up 181#0020 // Back Right Glass Down 181#0080 // Central Lock Open 291#09AA020000 // Central Lock Close 291#0955040000 // Update Light status of central lock (Когда отправляешь команду открыть/закрыть замок то на кнопке управления замком светодиод не изменяет состояние, чтобы он показал реальное состояние центрального замка, нужно отправить команду обновления) 291#0900000000 Мне было лень изучить все остальные устройства, поэтому в этом списке, только то что мне было интересно.
Разработка CAN шилда для Raspberry Pi
Схему шилда взял здесь lnxpps.de/rpie, там же и описание выводов, для общения с CAN используются 2 микросхемы MCP2515 и MCP2551. К шилду подключаются 2 провода CAN-High и CAN-Low. В SprintLayout 6 развел плату, может кому пригодится CANBoardRPi.lay (на заглавном фото прототип шилда на макетке).

Распиновка щитка приборов Лада Приора/Калина
| № | Подключение КП «Итэлма» с навигацией без CAN | Подключение КП «Итэлма» с навигацией и CAN |
| 1 | К электроусилителю руля | К электроусилителю руля |
| 2 | MUTE | MUTE |
| 3 | К датчику давления масла | Резерв |
| 4 | Выключатель стояночного тормоза | Выключатель стояночного тормоза |
| 5 | К блоку управления иммобилайзера (электропакета) | К блоку управления иммобилайзера (электропакета) |
| 6 | К блоку управления подушкой безопасности | Резерв |
| 7 | К модулю управления светом (сигнализатор вкл. освещения) | К модулю управления светом (сигнализатор вкл. освещения) |
| 8 | Переключатель указателя поворота (правая сторона) | Переключатель указателя поворота (правая сторона) |
| 9 | Переключатель указателя поворота (левая сторона) | Переключатель указателя поворота (левая сторона) |
| 10 | К блоку системы управления двигателем | Резерв |
| 11 | AUDIO OUT — «Aк.атареи» | AUDIO OUT — «Aк.атареи» |
| 12 | К датчику непристегнутых ремней | Резерв |
| 13 | К блоку ABS (неисправность EBD) | Резерв |
| 14 | Подрулевой переключатель «Buttons» | Подрулевой переключатель (Влево, ОК) |
| 15 | Датчик уровня тормозной жидкости | Датчик уровня тормозной жидкости |
| 16 | К блоку ABS (неисправность ABS) | Резерв |
| 17 | К выключателю дальнего света фар | К выключателю дальнего света фар |
| 18 | К модулю управления светом (регулятор освещения шкал) | К модулю управления светом (регулятор освещения шкал) |
| 19 | Корпус | Корпус |
| 20 | Клемма «30» АКБ | Клемма «30» АКБ |
| 21 | Клемма «15» выключателя зажигания | Клемма «15» выключателя зажигания |
| 22 | К блоку управления (сигнал расхода топлива) | Резерв |
| 23 | К подрулевому переключателю «UP» | К подрулевому переключателю (вниз, меню) |
| 24 | К подрулевому переключателю «DOWN» | К подрулевому переключателю (вправо, вверх) |
| 25 | К радиоприемнику «AUDIO OUT «+» | К радиоприемнику «AUDIO OUT «+» |
| 26 | К датчику наружной температуры | К датчику наружной температуры |
| 27 | К датчику уровня топлива | К датчику уровня топлива |
| 28 | К датчику скорости | CAN-L |
| 29 | К датчику температуры охл. жидкости | CAN-H |
| 30 | К блоку упр. двигателем (сигнал тахометра) | Резерв |
| 31 | Служебная диагностика | Служебная диагностика |
| 32 | К клемме «L» реле-регулятора генератора | Резерв |
Разъем приборной панели Приора/Калина:

Навигация в панели приборов работает на Windows CE 6.0 вместе с ПО Navitel. Предусмотрено обновление ПО и загрузка навигационных карт с USB-карты через специальный USB вход. Эксплуатация автомобиля станет на много приятней, единственный недостаток — высокая цена.

А вам приходилось ставить на Приору или Калину щиток приборов нового образца с навигацией? Какие трудности у вас возникали в ходе этой доработки? Напомним, на сайте лада.онлайн можно найти другие инструкции по тюнингу и доработке автомобилей Лада Приора или Калина, например, как отрегулировать электронную педаль газа или улучшить тормоза без переделок.
В связи с отсутствием лобового стекла, решил наконец таки установить новую панель. Особых сложностей в установке нету, снял старую, установил новую.







Цена вопроса: 10 000 ₽
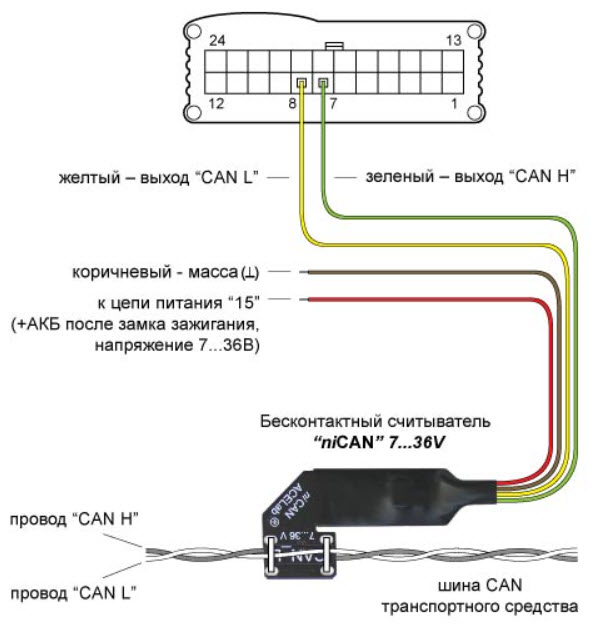
Подключение к CAN шине авто
Немного изучив открытую документацию на CAN шину VW я выяснил, что у меня используется 2 шины.
Шина CAN силового агрегата
, передающая данные со скоростью 500 кбит/с, связывает все обслуживающие этот агрегат блоки управления.
Например, к шине CAN силового агрегата могут быть подключены следующие приборы:
- блок управления двигателем,
- блок управления АБС,
- блок управления системой курсовой стабилизации,
- блок управления коробкой передач,
- блок управления подушками безопасности,
- комбинация приборов.
Шина CAN системы «Комфорт» и информационнокомандной системы
, позволяющая передавать данные со скоростью 100 кбит/с между обслуживающими эти системы блоками управления.
Например, к шине CAN системы «Комфорт» и информационно 
Теперь я могу слушать, все что происходит в CAN шине «Комфорт» и отправлять команды.
Установка ПО для работы с CAN шиной
На Raspbian 2-x годичной давность мне потребовалось пропатчить bcm2708.c, чтобы добавить поддержку CAN (возможно сейчас это не требуется). Для работы с CAN шиной нужно установить пакет утилит can-utils с github.com/linux-can/can-utils, после этого подгрузить модули и поднять can интерфейс: # initialize insmod spi-bcm2708 insmod can insmod can-dev insmod can-raw insmod can-bcm insmod mcp251x # Maerklin Gleisbox (60112 and 60113) uses 250000 # loopback mode for testing ip link set can0 type can bitrate 125000 loopback on ifconfig can0 up Проверяем, что интерфейс CAN поднялся командой ifconfig
:

Проверить, что все работает можно отправив команду и получив ее.
В одном терминале слушаем:
# candump any,0:0,#FFFFFFFF В другом терминале отправляем: [email protected]
